

Shaddow is the project name for the hardware I’m building around a Mac that lives in a vehicle dashboard. The Mac does all the processing; Shaddow provides power, I/O, vehicle integration, and the physical mounting that makes a laptop behave like a head unit.
The current board is Front Dock — the first piece of Shaddow on a PCB.
Overview
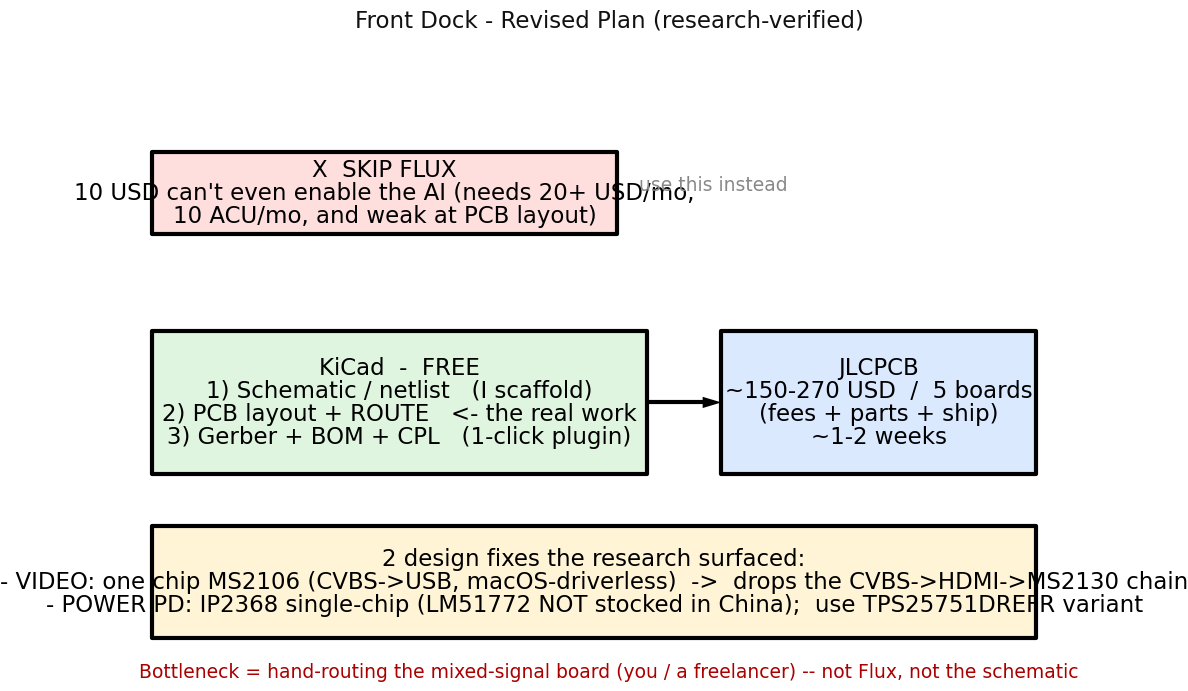
A 4-layer board, designed thin-edge / fat-core: a single USB 2.0 uplink to the Mac fans out through an on-board hub to every peripheral, and power is generated locally from a 12 V input (an EcoFlow LiFePO4 house battery in the test van). Target board cost: roughly $150–270 for the first 5 units through JLCPCB.
Stack
- Power — reverse-polarity FET (DMP3013SFV), TVS (SMCJ18CA), fused input → 45 W USB-C PD (LM51772 4-switch buck-boost + TPS25751 PD controller, EEPROM-configured for 5/9/15 V at ≤45 W). Then 5 V / 3 A via TPS54331 buck, 3.3 V via TLV1117. A separate isolated 5 V rail feeds the CAN side through an SN6505B transformer driver and a small isolation transformer.
- USB hub + Mac uplink — two cascaded FE1.1S 2.0 hubs, USB-C device uplink with proper CC pulldowns, USBLC6 ESD on every pair.
- Video — MS2130 USB-UVC capture fed by a CVBS-to-HDMI front end, with a THS7374 75 Ω buffer for a low-latency loop-through to the head unit.
- Audio — PCM2904 USB audio codec, AC-coupled line in and line out.
- Front camera — off-board IMX462 UVC module on a 4-pin USB header.
- Dual CAN, read-only, isolated — STM32G0B1 (native dual FDCAN) with two ISO1042 isolated transceivers on the vehicle-ground side. No on-board termination, listen-only — the only allowed TX is OBD-II PID requests.
- Control — ESP32-S3 over native USB-CDC, BTS7008 PROFET high-side switches driving relay outputs, INA226 monitoring the 12 V rail, plus brownout / ignition / reverse / door sense inputs.
- Remote start — Fortin EVO-FORT1 interface, opto-isolated on the vehicle-ground side: three dry-contact outputs (START / LOCK / UNLOCK) and two status inputs (RUNNING + status).
Design rules I committed to
Galvanic isolation between the CAN transceivers / Fortin interface and the board ground (single star to the EcoFlow DC negative). CAN strictly listen-only — the vehicle bus is already terminated, and I don’t want to write to anything I don’t have to. macOS sees the dual-CAN MCU as SLCAN and talks to it via python-can.
Status
Schematic and placement are done. I’m wrapping up the routing pass and DRC cleanup against JLCPCB’s rules, then it goes to fab. Rev B will add a bench-test harness so the same firmware that runs in a vehicle can validate the board on a desk — closing the loop between dashboard tests and the lab.
Why Flux.ai and KiCad
I started in Flux.ai for the schematic capture — fast, agreeable to the AI-assisted placement workflow, and good at the early-iteration phase when the architecture is still moving. The serious layout work moved to KiCad: more control over multi-layer routing, copper pours, and the exact JLCPCB-spec fab pack. Flux is the napkin; KiCad is where the board actually ships from.
Why it exists
A vehicle “12 V” rail is anything but 12 V. It sags during a crank, spikes on a load dump, and is noisy whenever the alternator is awake. Shaddow’s whole point is to absorb that and present clean, monitored rails to everything downstream — and to do the vehicle-bus integration so the Mac on top doesn’t have to.